Fitting to the RV data¶
Update: April 4/2022, Hajime Kawahara
Exojax has some function for planet dynamics. Here, we show an example of the RV fitting using HMC/NUTS.
import pandas as pd
import numpy as np
import jax.numpy as jnp
import tqdm
from jax import random
from jax import vmap, jit
import matplotlib.pyplot as plt
from exojax.dynamics.rvfunc import rvf
from exojax.dynamics.getE import getE
We first generate a mock RV curve.
N=100
t=np.random.rand(N)*100
T0=0.0
P=10.0
e=0.3
omegaA=0.5
Ksini=10.0
Vsys=5.0
model=rvf(t,T0,P,e,omegaA,Ksini,Vsys)
sigma=3.0
np.random.seed(1)
noise=np.random.normal(0.0,sigma,N)
rv=model+noise
err=sigma*np.ones(N)/2.0
The following is the fitting part.
import numpyro.distributions as dist
import numpyro
from numpyro.infer import MCMC, NUTS
from numpyro.infer import Predictive
from numpyro.diagnostics import hpdi
def model_c(t1,y1,e1):
P=numpyro.sample("P", dist.Uniform(8.0,12.0))
Ksini=numpyro.sample('Ksini', dist.Exponential(0.1)) #should be modified Jeffery later
T0 = numpyro.sample('T0', dist.Uniform(-6.0,6.0))
sesinw = numpyro.sample('sesinw', dist.Uniform(-1.0,1.0))
secosw = numpyro.sample('secosw', dist.Uniform(-1.0,1.0))
etmp=sesinw**2+secosw**2
e=jnp.where(etmp>1.0,1.0,etmp)
omegaA=jnp.arctan2(sesinw,secosw) #
# sigmajit=numpyro.sample('sigmajit', dist.Uniform(0.1,100.0))
sigmajit=numpyro.sample('sigmajit', dist.Exponential(1.0))
Vsys = numpyro.sample('Vsys', dist.Uniform(-10,10.0))
mu=rvf(t1,T0,P,e,omegaA,Ksini,Vsys)
errall=jnp.sqrt(e1**2+sigmajit**2)
numpyro.sample("y1", dist.Normal(mu, errall), obs=y1) #-
#Running a HMC-NUTS
rng_key = random.PRNGKey(0)
rng_key, rng_key_ = random.split(rng_key)
num_warmup, num_samples = 2000, 4000
kernel = NUTS(model_c)
mcmc = MCMC(kernel, num_warmup=num_warmup, num_samples=num_samples)
mcmc.run(rng_key_, t1=t, y1=rv, e1=err)
mcmc.print_summary()
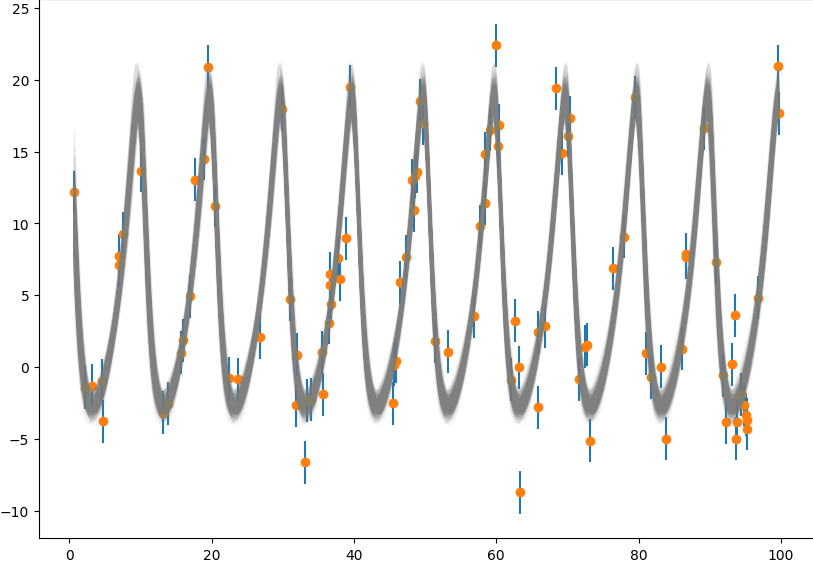
Save the posterior and plot the prediction.
#Post-processing
posterior_sample = mcmc.get_samples()
np.savez("savepos.npz",[posterior_sample])
fig=plt.figure(figsize=(10,7))
ax=fig.add_subplot(111)
ax.errorbar(t,rv,yerr=err,ls="none")
ax.plot(t,rv,"o")
sesinw=posterior_sample["sesinw"]
secosw=posterior_sample["secosw"]
eps=sesinw**2+secosw**2
omegaAps=jnp.arctan2(sesinw,secosw) #
tpre=jnp.linspace(np.min(t),np.max(t),3600)
for i in tqdm.tqdm(range(0,len(posterior_sample["P"][::10]))):
e=eps[i]
T0=posterior_sample["T0"][i]
P=posterior_sample["P"][i]
omegaA=omegaAps[i]
Ksini=posterior_sample["Ksini"][i]
Vsys=posterior_sample["Vsys"][i]
model=rvf(tpre,T0,P,e,omegaA,Ksini,Vsys)
ax.plot(tpre,model,alpha=0.05,color="gray")
plt.savefig("npz/results.png", bbox_inches="tight", pad_inches=0.0)
plt.show()